Location:Home Page > Archive Archive
Why is starting current of motor large? After starting, current is again small?
2023-04-20【Archive】

How big is motor starting current?
There are different opinions about how many times starting current of a motor exceeds rated current, and many of them are based on specific conditions. For example, more than ten times, 6-8 times, 5-8 times, 5-7 times, etc.
One of them is that when motor speed is zero at moment of starting (that is, at beginning of starting process), current value at that time should be its stopping current value.
For most commonly used Y-series three-phase asynchronous motors, there are clear rules in JB/T 10391 "Y-series three-phase asynchronous motors". Among them, set value of ratio of locked rotor current to rated motor current of 5.5 kW is as follows:
At a synchronous speed of 3000, ratio of locked rotor current to rated current is 7.0;
At a synchronous speed of 1500, ratio of locked rotor current to rated current is 7.0;
At a synchronous speed of 1000, ratio of locked rotor current to rated current is 6.5;
At 750 synchronous speed, ratio of locked rotor current to rated current is 6.0.
The power of a 5.5kW motor is relatively large, and ratio of starting current to rated current is smaller for a motor of smaller power, so electrical textbooks and many places say that starting current of an induction motor is 4-7 times rated running current.

Why is motor starting current large? Is current low after starting?
Here you need to understand in terms of principle of starting engine and principle of engine rotation:
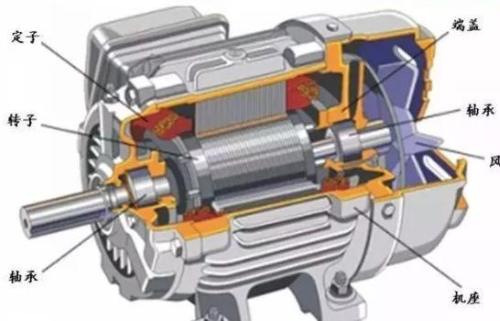
When an induction motor is stopped, it looks like a transformer from an electromagnetic point of view. The stator winding connected to power supply is equivalent to primary winding of transformer, and closed circuit rotor winding is equivalent to short-circuited secondary winding of transformer. There is no electrical connection between stator winding and rotor winding, only a magnetic connection, and magnetic flux forms a closed loop through stator, air gap and rotor core.
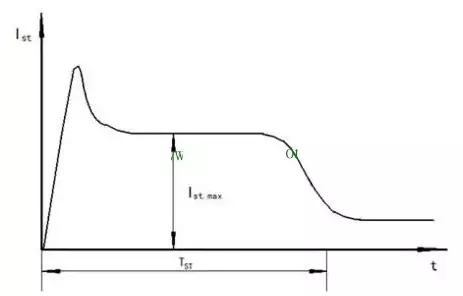
At moment of switching on, rotor has not rotated due to inertia, and rotating magnetic field cuts rotor winding at maximum cutting speed - synchronous speed, so that rotor winding induces maximum possible potential, thus flowing through rotor conductor. Large current, this current produces magnetic energy that cancels stator magnetic field, just like secondary magnetic flux of a transformer must cancel primary magnetic flux.
The stator automatically increases current to maintain original magnetic flux, compatible with power supply voltage at that moment. Since rotor current is very large at this time, stator current also increases greatly, even 4-7 times rated current, which is reason for large starting current.
Why current is small after starting: As motor speed increases, speed at which stator magnetic field crosses rotor conductor decreases, induced potential in rotor conductor decreases, and current in rotor conductor also decreases, so stator current is used to displace rotor. The part of current that is affected by magnetic flux generated by current also decreases, so stator current changes from large to small until it becomes normal.

What are ways to reduce motor starting current?
Common starting methods to reduce motor starting current include direct starting, series resistance starting, autotransformer starting, wye-delta decompression starting, and inverter starting to reduce impact on power system.
Direct launch
Direct starting is to connect motor stator winding directly to power supply and start it at rated voltage. It has characteristics of large starting torque and short starting time, and is easiest, most economical and most reliable way to start. The current is large at full voltage start, but starting torque is small, operation is convenient, and start is fast. However, this starting method requires relatively large mains power and load, and is mainly suitable for starting motors below 1W.
Start of resistance series
Sequential motor start with resistance, which is a step start method. During starting process, a resistor is connected in series in stator winding circuit. When starting current passes, a voltage drop is created on resistance, which reduces voltage applied to stator winding, so that goal of reducing starting current can be achieved.
Autotransformer start
The use of autotransformer multi-stage decompression can not only meet needs of starting with different loads, but also get more starting torque. This decompression starting method is often used to start large power motors. Its biggest advantage is that starting torque is relatively large. When its winding tap is at 80%, starting torque can reach 64% of direct starting, and starting torque can be adjusted with tap.
Start Delta Decompression
For a squirrel-cage induction motor with delta stator winding, in normal operation, if stator winding is wye connected at start and then delta connected after start, starting current can be reduced. and His influence on grid. This launch method is called a star-delta decompression launch or simply a star-delta launch. With star-delta starting, starting current is only 1/3 of original direct start according to delta connection. When starting a star-delta, starting current is only 2-2.3 times.
That is, when a star-delta connection is used, starting torque is also reduced to 1/3 of original direct start according to delta connection. Suitable for no-load or light-load starting. And compared to any other decompression starter, its construction is simplest and price is cheapest. In addition, star-delta starting method has another advantage: motor can be operated in star mode when load is light. At this time, rated torque can be matched with load, which can improve efficiency of motor and thus reduce power consumption.
Inverter start
TransformThe frequency inverter is a motor control device with highest technical content, most complete control functions and best control effect in field of modern motor control. It adjusts speed and torque of motor by changing frequency of power system. Because it incorporates power electronic technology and microcomputer technology, cost is high, and requirement for maintenance personnel is also high, so it is mainly used in areas requiring speed regulation and high demands on speed control.
Related
- Why is starting current of motor large? After starting, current is again small?
- Why is there no current limiting resistor in LED?
- Understand Current Detection Circuit in One Article
- Why is power supply ripple so big?
- What is drowning in gold? Why Shen Jin?
- Why is analog electronics so hard to learn?
- Why is electricity divided into AC and DC?
- Why is capacitance Y generally not more than 0.1uF?
- Does LED drive power need to be a constant current source?
- Why do LED bulbs get dimmer the more they are used? Why is it flickering?
Hot Posts
 How to distinguish induction from leakage, we will teach you three tricks! Ordinary people can also learn super practical
How to distinguish induction from leakage, we will teach you three tricks! Ordinary people can also learn super practical
- What is drowning in gold? Why Shen Jin?
- This is a metaphor for EMI/EMS/EMC that can be understood at a glance.
- How many types of pads have you seen in PCB design?
- Summary of Common PCB Repair Techniques
- What is three anti-paint? How to use it correctly?
- Knowing these rules, you will not get confused looking at circuit diagram.
- How to make anti-interference PCB design?
- Can diodes do this?